Barebone DQN-verliesfunctie
Nu de functie select_action() klaar is, ben je nog maar één laatste stap verwijderd van het trainen van je agent: je gaat nu calculate_loss() implementeren.
De functie calculate_loss() geeft het netwerkverlies terug voor een willekeurige stap in de episode.
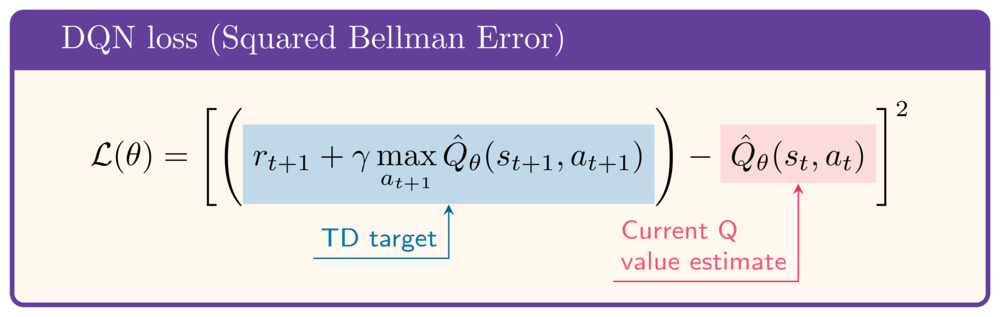
Ter referentie, het verlies is gegeven door:
De volgende voorbeeldgegevens zijn in de oefening geladen:
state = torch.rand(8)
next_state = torch.rand(8)
action = select_action(q_network, state)
reward = 1
gamma = .99
done = False
Deze oefening maakt deel uit van de cursus
Deep Reinforcement Learning in Python
Oefeninstructies
- Bepaal de Q-waarde van de huidige toestand.
- Bepaal de Q-waarde van de volgende toestand.
- Bereken de doel-Q-waarde, oftewel de TD-target.
- Bereken de verliesfunctie, d.w.z. de squared Bellman Error.
Interactieve oefening met praktijkervaring
Probeer deze oefening door deze voorbeeldcode aan te vullen.
def calculate_loss(q_network, state, action, next_state, reward, done):
q_values = q_network(state)
print(f'Q-values: {q_values}')
# Obtain the current state Q-value
current_state_q_value = q_values[____]
print(f'Current state Q-value: {current_state_q_value:.2f}')
# Obtain the next state Q-value
next_state_q_value = q_network(next_state).____
print(f'Next state Q-value: {next_state_q_value:.2f}')
# Calculate the target Q-value
target_q_value = ____ + gamma * ____ * (1-done)
print(f'Target Q-value: {target_q_value:.2f}')
# Obtain the loss
loss = nn.MSELoss()(____, ____)
print(f'Loss: {loss:.2f}')
return loss
calculate_loss(q_network, state, action, next_state, reward, done)