Funzione di loss del DQN essenziale
Ora che la funzione select_action() è pronta, ti manca solo un ultimo passo per poter addestrare il tuo agente: implementerai calculate_loss().
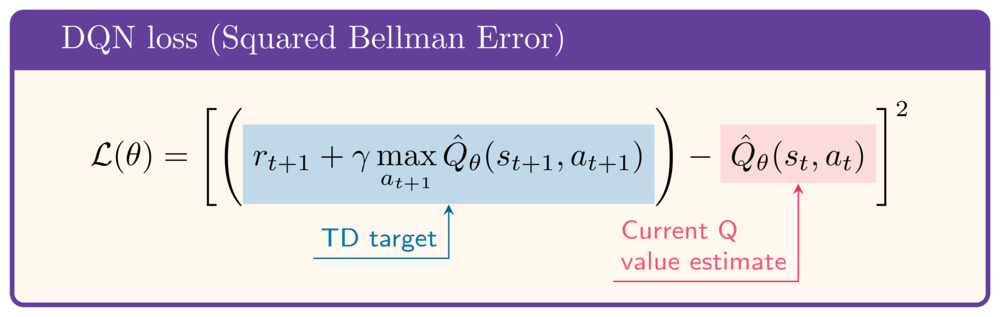
calculate_loss() restituisce la loss della rete per un dato passo dell'episodio.
Per riferimento, la loss è definita come segue:
Nel seguente esempio, i dati sono già stati caricati nell'esercizio:
state = torch.rand(8)
next_state = torch.rand(8)
action = select_action(q_network, state)
reward = 1
gamma = .99
done = False
Questo esercizio fa parte del corso
Deep Reinforcement Learning in Python
Istruzioni dell'esercizio
- Ottieni il Q-value dello stato corrente.
- Ottieni il Q-value del prossimo stato.
- Calcola il Q-value target, o TD-target.
- Calcola la funzione di loss, cioè il Bellman Error al quadrato.
esercizio interattivo pratico
Prova questo esercizio completando questo codice di esempio.
def calculate_loss(q_network, state, action, next_state, reward, done):
q_values = q_network(state)
print(f'Q-values: {q_values}')
# Obtain the current state Q-value
current_state_q_value = q_values[____]
print(f'Current state Q-value: {current_state_q_value:.2f}')
# Obtain the next state Q-value
next_state_q_value = q_network(next_state).____
print(f'Next state Q-value: {next_state_q_value:.2f}')
# Calculate the target Q-value
target_q_value = ____ + gamma * ____ * (1-done)
print(f'Target Q-value: {target_q_value:.2f}')
# Obtain the loss
loss = nn.MSELoss()(____, ____)
print(f'Loss: {loss:.2f}')
return loss
calculate_loss(q_network, state, action, next_state, reward, done)