Barebone DQN loss function
With the select_action() function now ready, you are just one final step short of being able to train your agent: you will now implement calculate_loss().
The calculate_loss() returns the network loss for any given step of the episode.
For reference, the loss is given by:
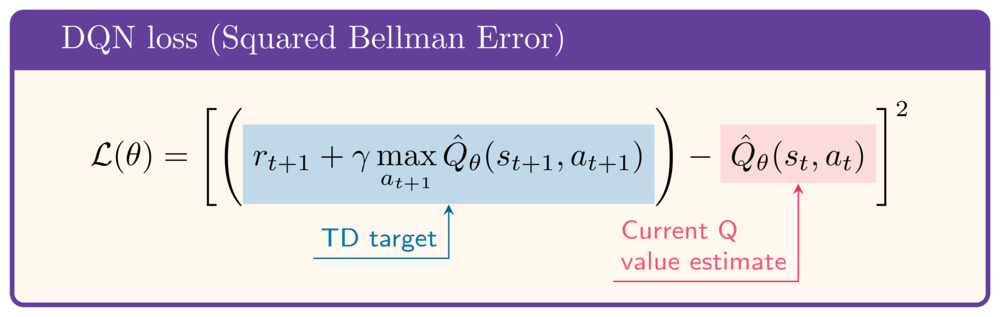
The following example data has been loaded in the exercise:
state = torch.rand(8)
next_state = torch.rand(8)
action = select_action(q_network, state)
reward = 1
gamma = .99
done = False
This exercise is part of the course
Deep Reinforcement Learning in Python
Exercise instructions
- Obtain the current state Q-value.
- Obtain the next state Q-value.
- Calculate the target Q-value, or TD-target.
- Calculate the loss function, i.e. the squared Bellman Error.
Hands-on interactive exercise
Have a go at this exercise by completing this sample code.
def calculate_loss(q_network, state, action, next_state, reward, done):
q_values = q_network(state)
print(f'Q-values: {q_values}')
# Obtain the current state Q-value
current_state_q_value = q_values[____]
print(f'Current state Q-value: {current_state_q_value:.2f}')
# Obtain the next state Q-value
next_state_q_value = q_network(next_state).____
print(f'Next state Q-value: {next_state_q_value:.2f}')
# Calculate the target Q-value
target_q_value = ____ + gamma * ____ * (1-done)
print(f'Target Q-value: {target_q_value:.2f}')
# Obtain the loss
loss = nn.MSELoss()(____, ____)
print(f'Loss: {loss:.2f}')
return loss
calculate_loss(q_network, state, action, next_state, reward, done)